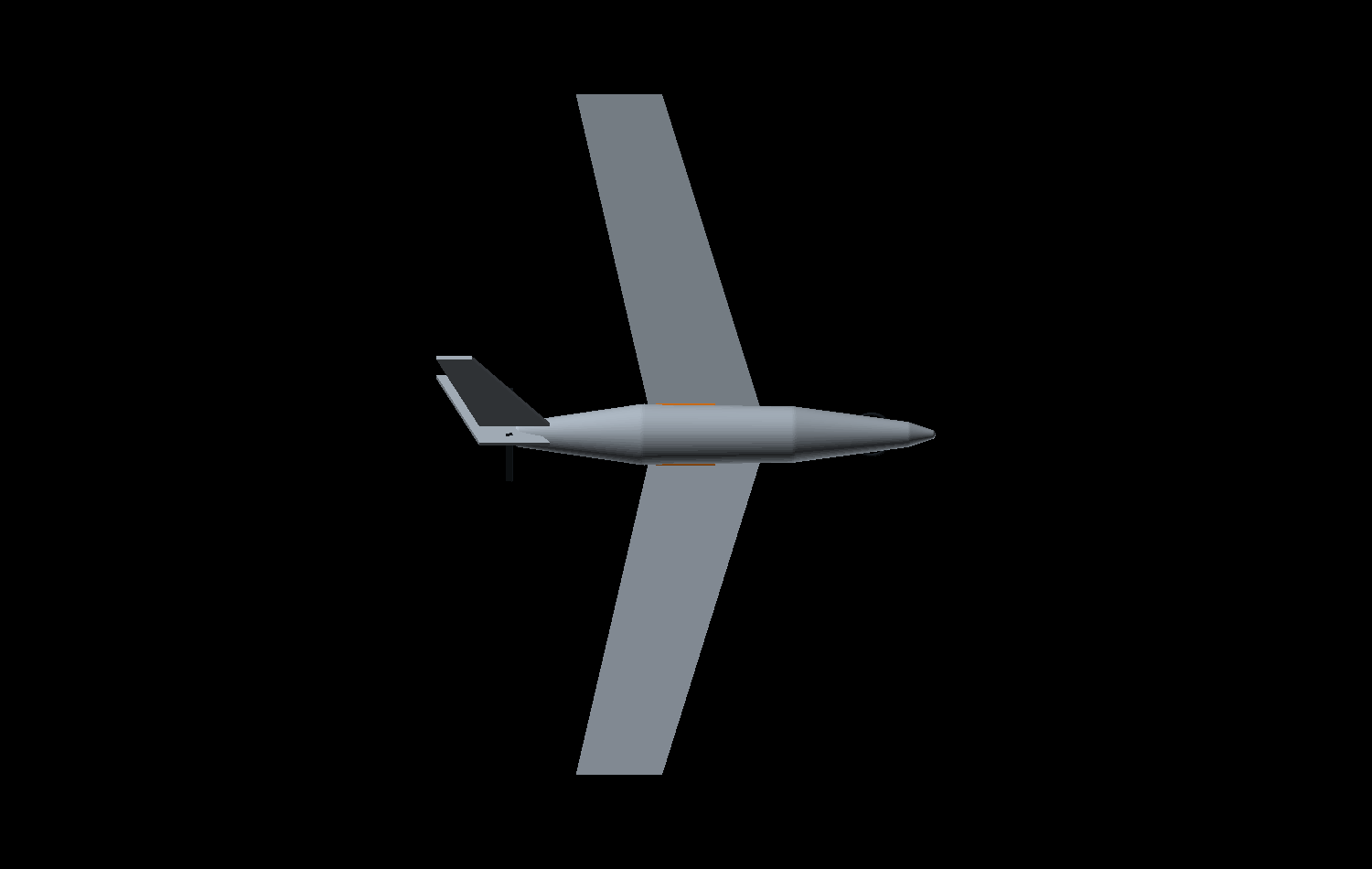
WILDFIRE, drawn.
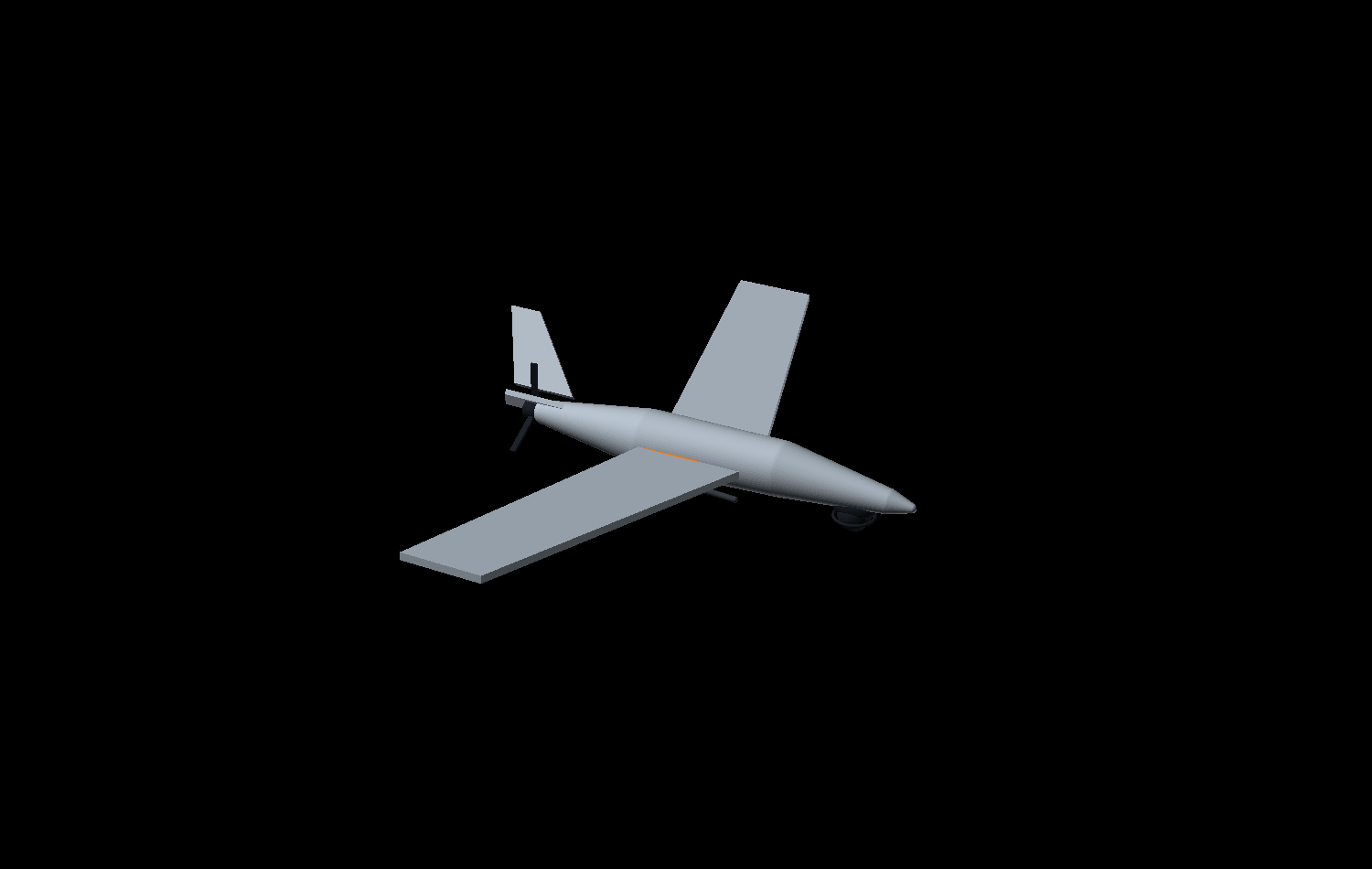
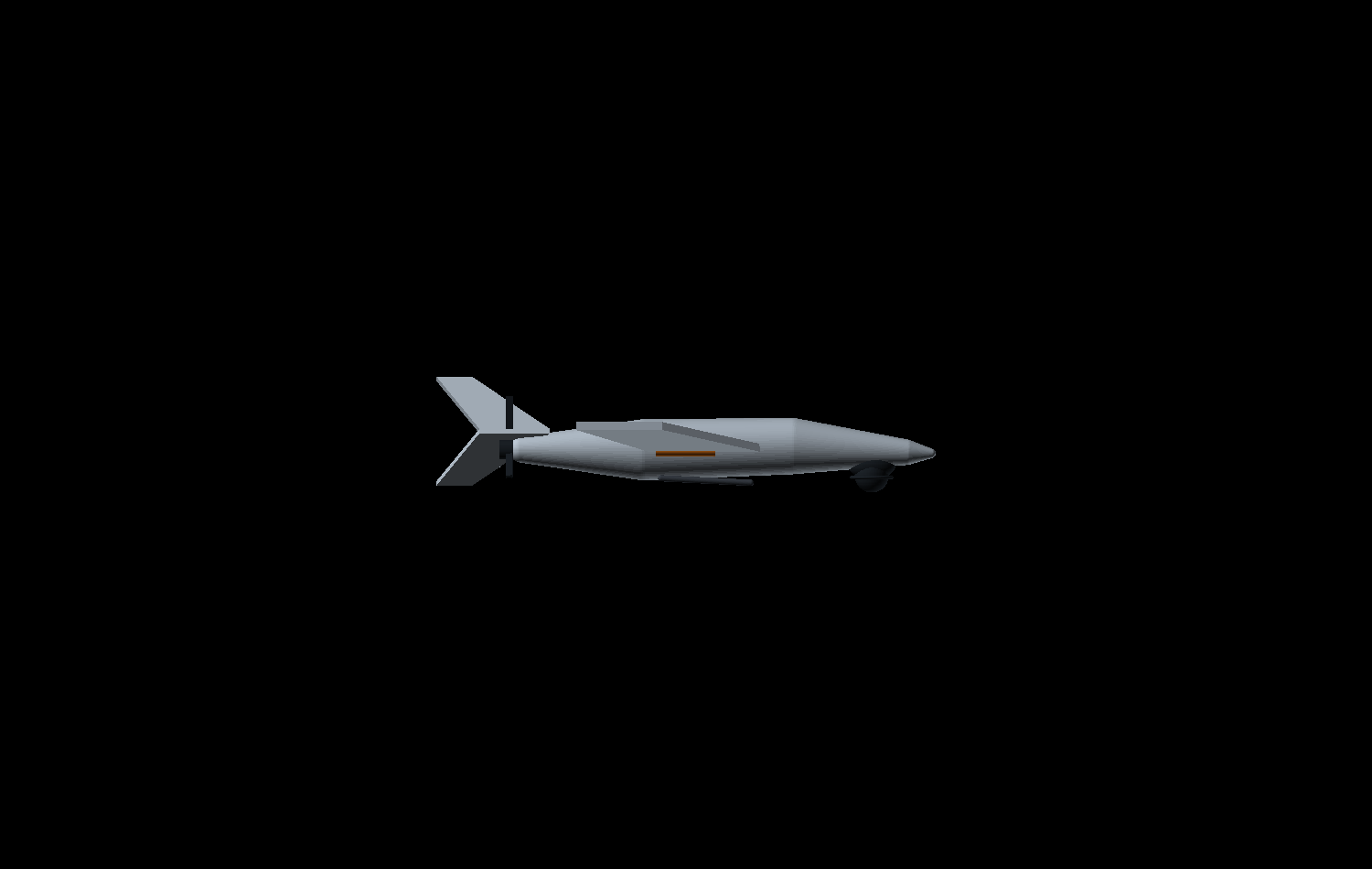
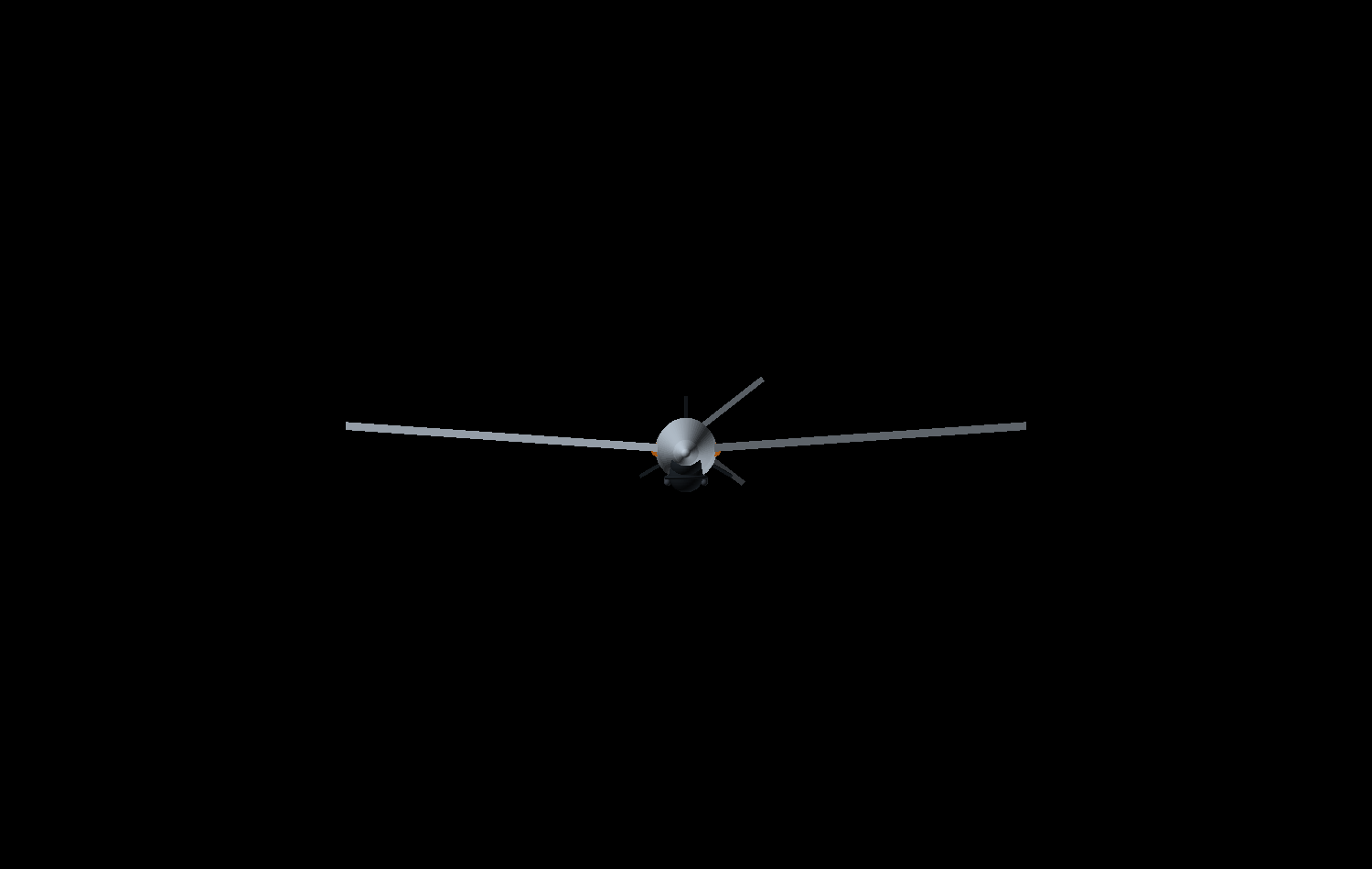
A fully parametric OpenSCAD model — monocoque shell, pusher, V-tail, retractable tricycle gear, faired & guarded EO/IR turret — rendered to a dimensioned plan & profile, four orthographic/iso views, a 13-part exploded assembly, a structural half-section cutaway, and a 360° assembly animation — all generated deterministically from one source file. Concept GA; dimensions are targets [TBR]. ↓ GA source (.scad) · ↓ Assembly source (.scad)
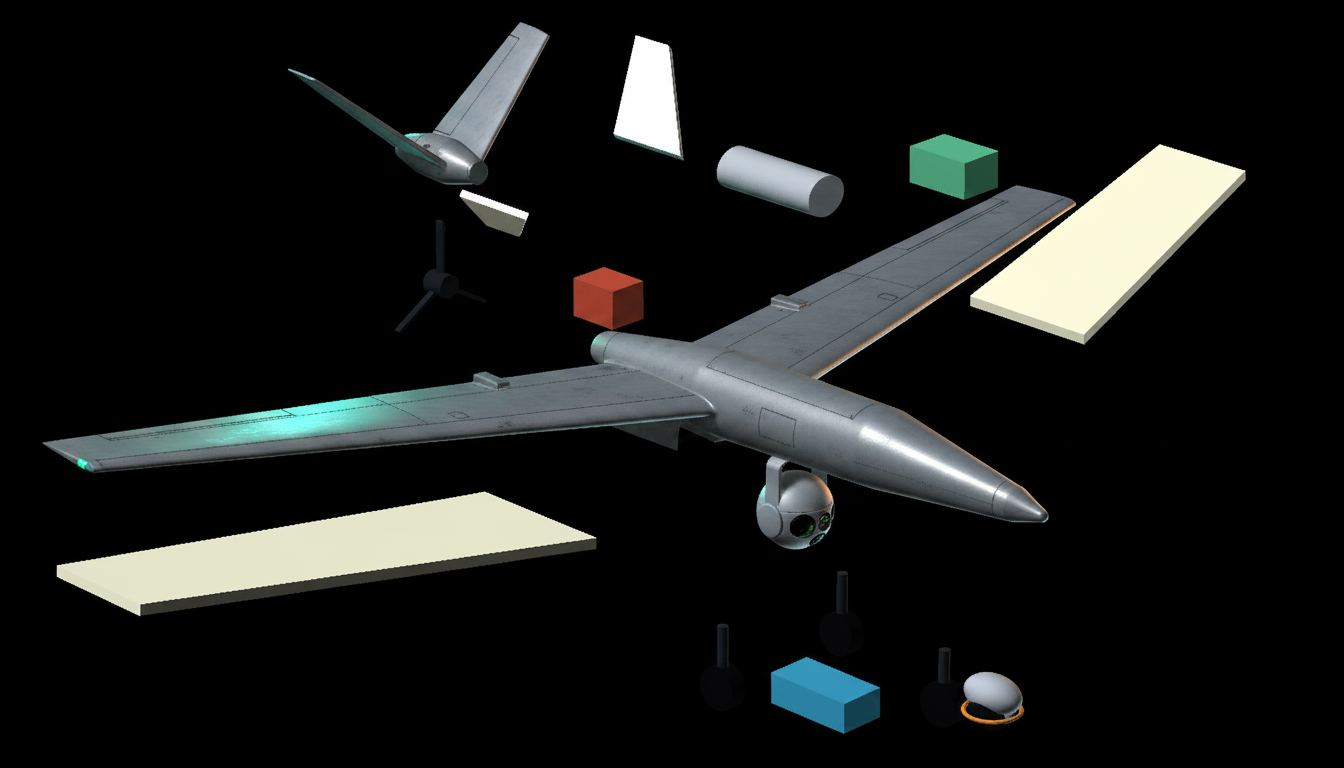
Thirteen subsystems, pulled apart.
The same parametric model, driven by an explode factor — every component separated along its own assembly axis. Internal subsystems are concept massing [TBR].
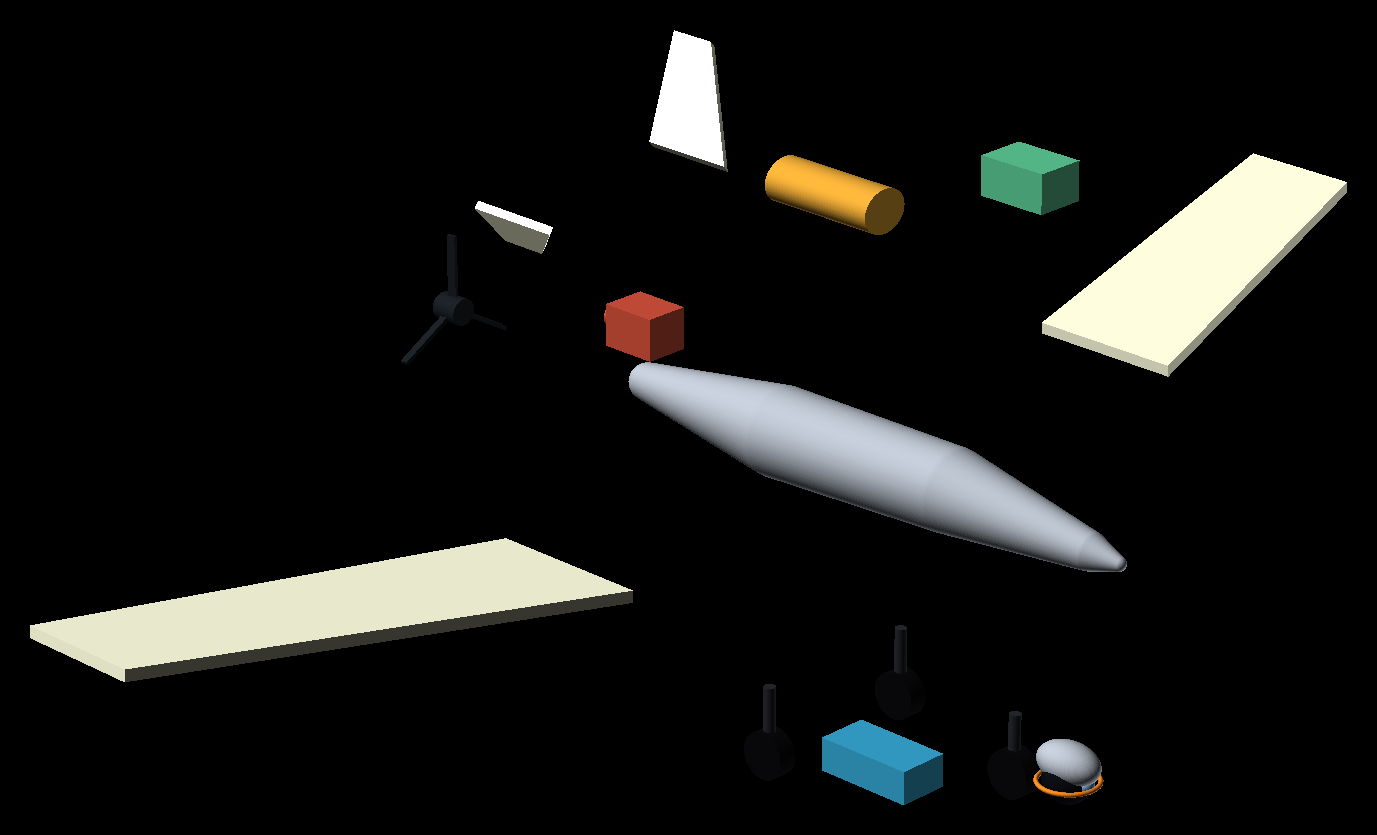
- EO/IR gimbal turret + laser designator ×1
- Avionics / autonomy bay (Lattice + Thor) ×1
- Heavy-fuel tank (~45 kg) ×1
- Modular mission bay (25 kg, swappable) ×1
- Heavy-fuel engine (~35 hp) ×1
- Pusher propeller + hub ×1
- Wing — port / starboard ×2
- V-tail ruddervator ×2
- Nose landing gear (retractable) ×1
- Main landing gear (retractable) ×2
- Monocoque shell + frames + spar ×1
Half-sectioned, down to the frames.
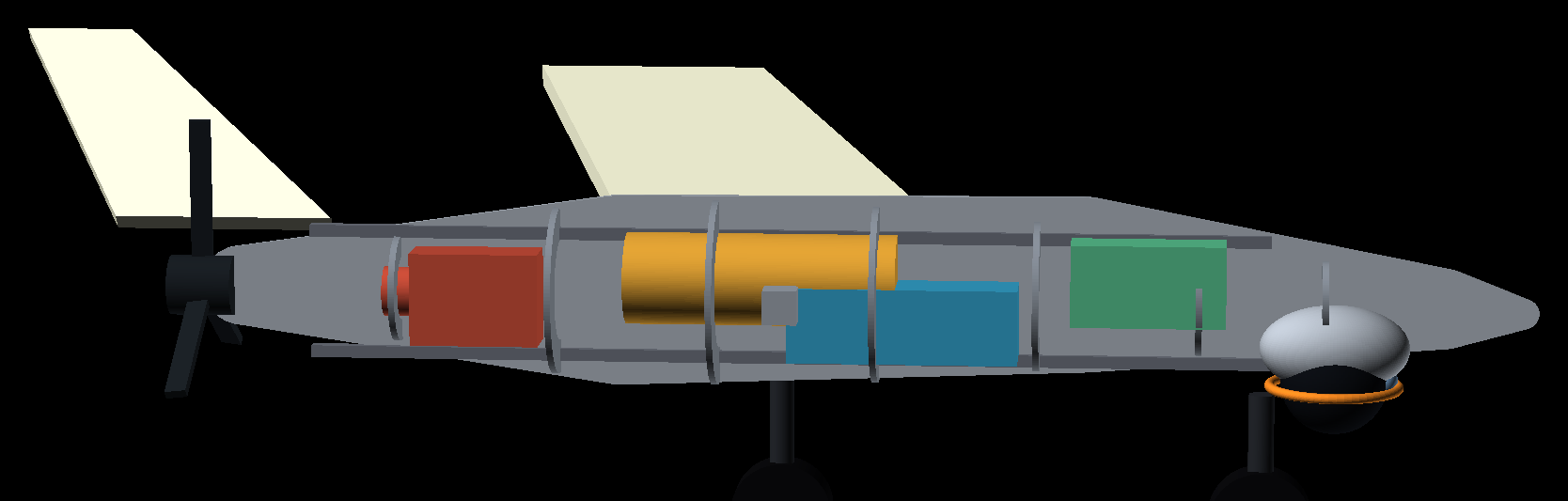
Watch it come together.
The same geometry, realized.
Each photoreal frame is generated from the CAD render itself (image-to-image) — the model keeps the exact geometry and re-lights it as real hardware. Concept visualization beside the technical drawings above.