Built for the AI Grand Prix
Anduril's AI Grand Prix races fully-autonomous quads on identical, Neros-built hardware — software only, no pilots, no mods — on the Drone Champions League platform. Qualifier Apr–Jun 2026 → in-person training (SoCal) Sept → live championship in Columbus, OH, Nov 2026. This 5-inch build is the same class — your bench to develop and fly before the spec drone is in your hands.
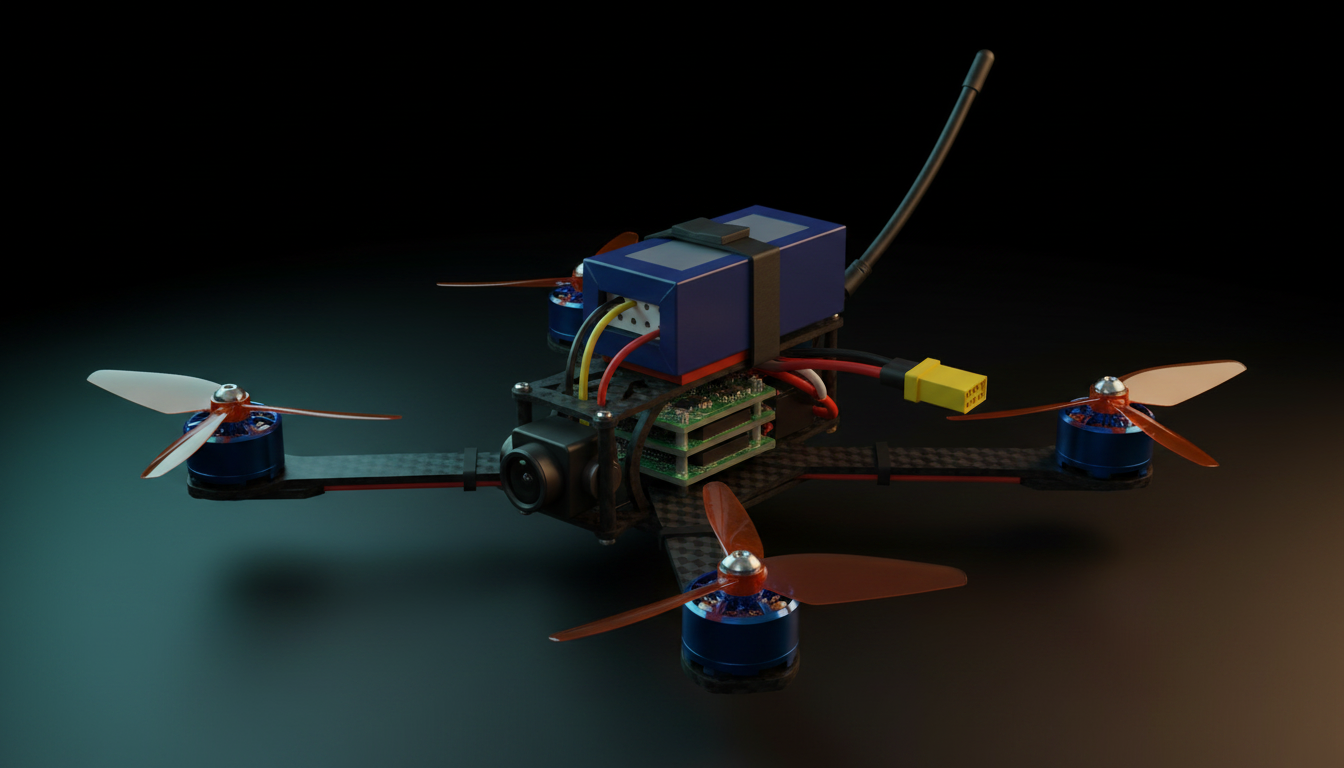
The build
A proven 6S freestyle/race spec — every part chosen so a first-timer can solder it in an afternoon and a racer can send it.
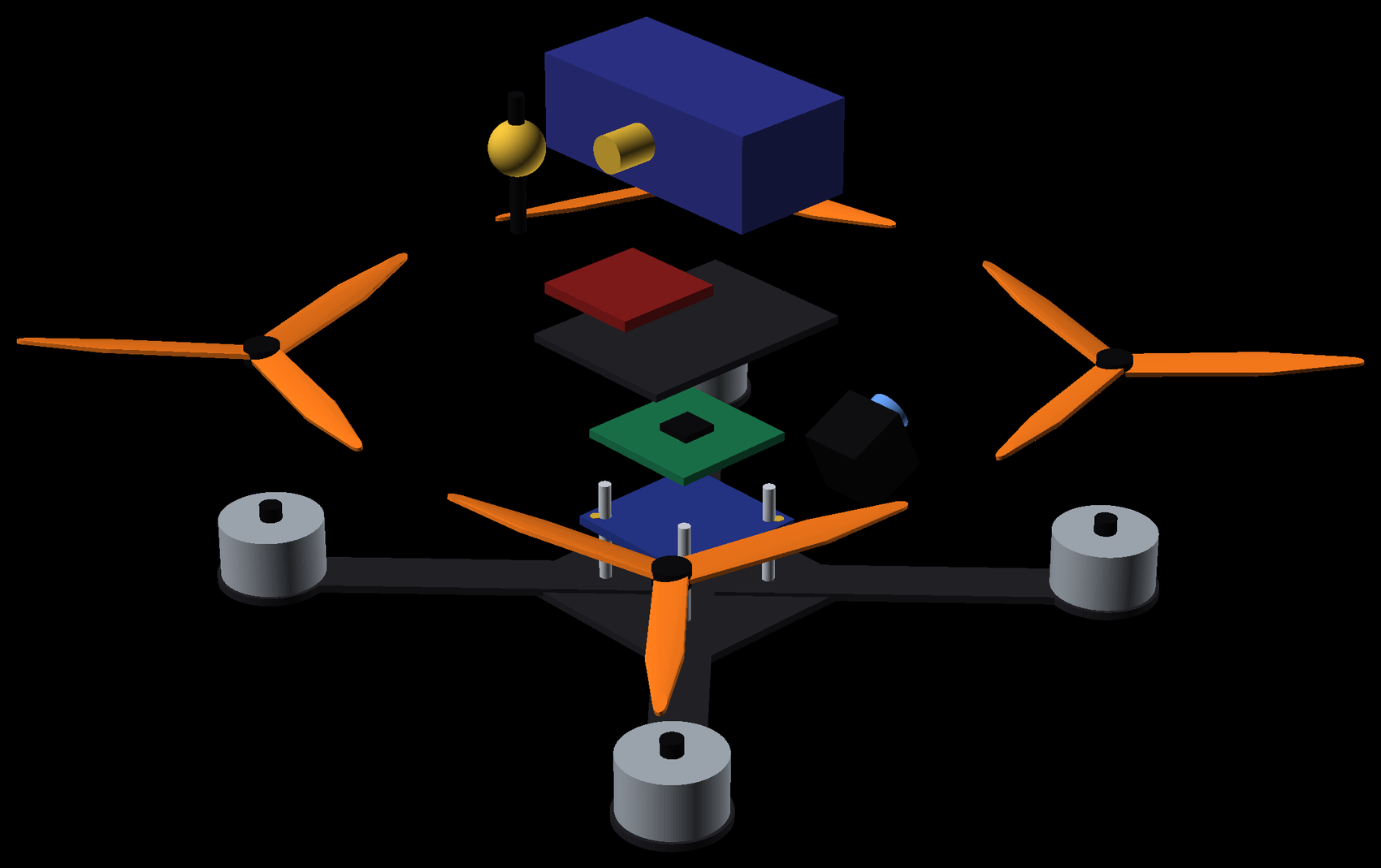
Exploded
Pulled apart in build order — frame & motors at the base, the ESC + FC stack in the middle, FPV gear and the LiPo on top.
Parts list
Swap the FPV system for analog if you're on a budget; everything else stays.
| Part | Pick | Spec / why |
|---|---|---|
| Frame | 5" carbon X-frame, 5 mm arms | TBS Source One V5 / GEPRC Mark5 — 30.5×30.5 stack, ~220 mm WB |
| Motors ×4 | 2207, ~1800 kV (6S) | T-Motor F60 / Emax ECO II — torque + efficiency |
| 4-in-1 ESC | BLHeli_32 / AM32, 55 A | Bidirectional DShot for RPM filtering |
| Flight controller | F7 (or F405), ICM-42688 | Betaflight, OSD, 2+ UARTs, 30.5 mount |
| Props ×4 +spares | 5×4.3×3 tri-blade | Gemfan 51466 / HQ 5.1×4.6×3 — props-OUT |
| FPV system | DJI O3 Air Unit (digital) | or analog: Caddx Ratel 2 + 800 mW VTX |
| Receiver | ExpressLRS 2.4 GHz | CRSF, 420000 baud — low latency, long range |
| Battery | 6S 1300 mAh LiPo 100C | or 6S Li-ion (P42A) for long range |
| Antennas | 5.8 GHz RHCP + ELRS dipole | lollipop video; T-antenna control |
| Misc | XT60 · 470 µF/35 V cap · soft-mounts · strap | cap protects the ESC; grommets cut prop-wash noise |
Wiring & signal
Power in amber, data in teal. The 4-in-1 ESC feeds the four motors over DShot; the FC talks to the FPV system and the ELRS receiver over UARTs.
Build, step by step
Twelve steps from bare frame to maiden. Solder clean; check motor direction before props go on.
- Mount motors. Bolt each 2207 to its arm with M3 screws — confirm length clears the windings.
- Solder motors → ESC. 3 motor wires to each ESC pad group (any order; fix spin direction in software).
- Power input. Solder the XT60 pigtail + a low-ESR cap (470 µF/35 V) across the ESC battery pads.
- Mount the stack. Soft-mount the ESC; add the 30.5 mm standoffs.
- FC on ESC. Connect FC↔ESC via the 8-pin harness (DShot signals + power + current sense).
- Receiver. Wire the ELRS RX to a spare UART (CRSF) + 5 V/GND.
- FPV. Power the O3/Air Unit off the capped pad; UART to the FC; camera tilt ~25–35°.
- Close it up. Fit the top plate; route the antennas up and back, away from carbon.
- Betaflight. Ports (RX = CRSF, VTX); motor direction (props-out); DShot600; RPM filtering on.
- ELRS bind. Bind, set link rate 250–500 Hz, model-match; set arm + mode switches.
- Checks. Calibrate accel; verify OSD + telemetry; motor-test (no props) for direction.
- Maiden. Props on (props-OUT) + nuts torqued; range check; hover-trim, then send it.
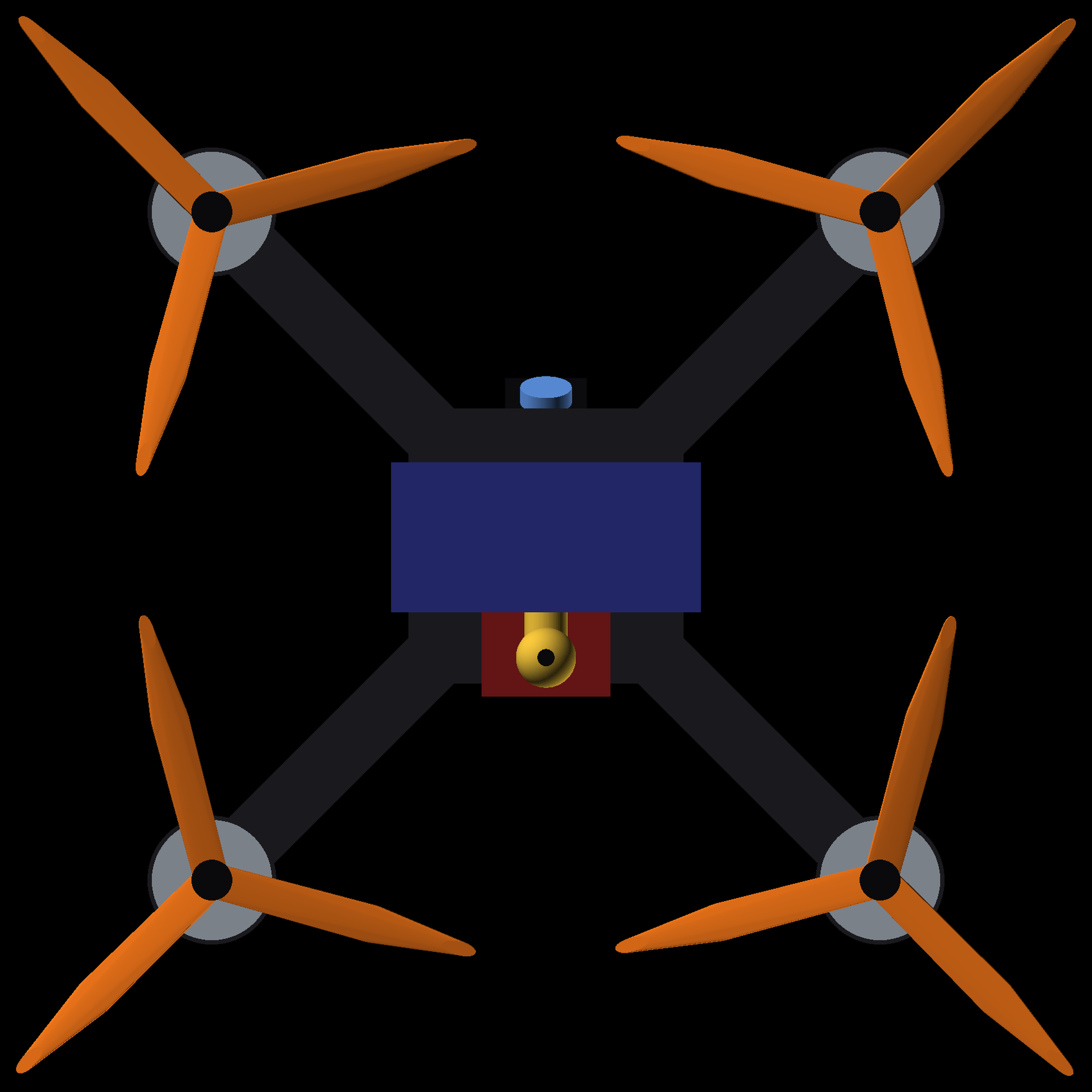
Frame layout
True-X, ~220 mm wheelbase, 30.5×30.5 stack mount, motors at the arm ends. Camera faces forward; antennas exit up and back.
Send it
Betaflight + ExpressLRS. Start safe, then dial it in — and go rip a gate.